文章图片
【嘉勤点评】黑芝麻智能发明的利用安装在车辆周围的摄像机和雷达进行360度全景环视的拼接光学图像的方案 , 主要采用一种拼接全景光学图像的方法 , 通过识别光学图像物体之间的衔接缝 , 来检测图像与图像之间是否可以进行拼接 , 并映射到雷达图像数据中 , 从而完成360度全景环视的拼接 。
集微网消息 , 近日 , 全球自动驾驶计算芯片引领者黑芝麻智能科技有限公司宣布今年已经完成数亿美元战略轮及C轮融资两轮融资 , 战略轮由小米长江产业基金 , 富赛汽车等国内产业龙头企业参与投资 。
黑芝麻智能成立于 2016 年 , 致力于打造性能最强、算力最高的国产自动驾驶计算芯片 。 为了配合其研制的华山系列自动驾驶芯片 , 黑芝麻智能还发布了山海人工智能开发平台 。 它拥有50多种AI参考模型库转换用例 , 可降低客户的算法开发门槛 , 还能够助力客户快速移植模型和部署落地的一体化流程 。
而该算法库的作用之一 , 就是完成汽车的全景环视 。 目前 , 汽车全景环视可用于在交通中辅助驾驶员或用于安全地停放车辆 , 而且可以用于车辆的缓慢操控 , 车辆所搭载的雷达和摄像头可以通过检测车辆周围的物体以帮助驾驶员避免发生碰撞 。
而为了实现真正意义上的汽车360度全景环视 , 黑芝麻智能在2019年5月5日申请了一项名为“利用安装在车辆周围的摄像机和雷达进行360度全景环视的拼接光学图像的方法”的发明专利(申请号:201910367735.0) , 申请人为黑芝麻智能科技(上海)有限公司 。
根据该专利目前公开的相关资料 , 让我们一起来看看这项技术方案吧 。
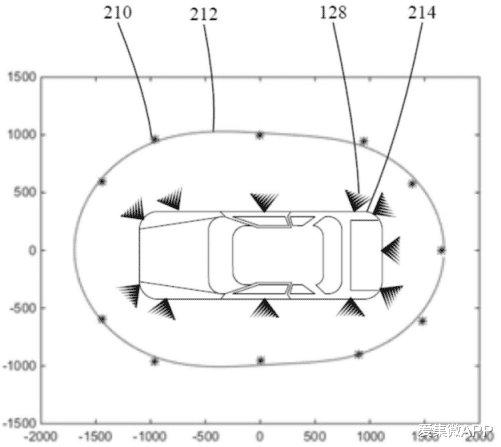
首先 , 在介绍具体的360度全景环视的拼接方法之前 , 我们先来看看该专利中展示的二维雷达数据和三维雷达数据的特点 。 如上图 , 为该专利中展示的二维雷达的拟合曲线 , 该二维(2D)曲线利用B样条拟合方法进行绘制 , 其中多个“*”号210表示来自雷达128的稀疏雷达数据 , 并且拟合曲线212(线)表示2D曲线 。 车辆214的xy-中心位于(0 , 0) 。
从该图中 , 我们可以获取来自雷达的雷达成像数据 , 即距周围车辆的距离 , 并且拟合2D曲线以包含从车辆到由雷达检测到的各个物体的距离 。
接着 , 如上图 , 为该专利中展示的基于二维雷达拟合曲线图像所构建的三维拟合曲线310、312和314 , 被2D拟合曲线212所平滑的雷达距离从地面被延伸到预设高度 , 即线212被延伸到3D网格中并形成壁 , 这种3D延伸的壁将被处理为3维图像的表面 , 来自光学传感器的光学图像在该表面上被映射 , 从而将3维图像展示出来 。
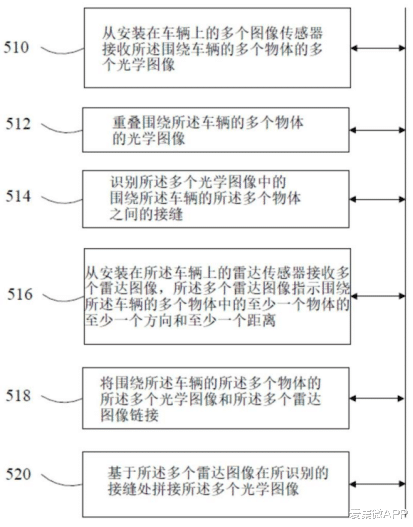
最后 , 我们再来看看该方案中发明的360度全景环视的拼接方法示意图 , 如上图所示 , 该方法可以从安装在车辆上的多个图像传感器中接收围绕车辆的多个物体的多个光学图像 , 这些光学图像来自于围绕车辆布置的不同摄像头中 。 由于摄像头拍摄的图像之间存在有景象的缺失 , 因此该方案中利用检测多个物体的接缝来识别不同摄像头所拍摄的部位 。
具体而言 , 对接缝的识别可以通过寻找物体间的减少纹理的区域来实现 , 从而对光学图像进行拼接 , 并且 , 通过将光学图像映射到雷达图像的方式 , 也可以完成多个雷达图像的衔接任务 , 从而达到360度全景环视的效果 。
以上就是黑芝麻智能发明的利用安装在车辆周围的摄像机和雷达进行360度全景环视的拼接光学图像的方法 , 该方案主要采用一种拼接全景光学图像的方法 , 通过识别光学图像物体之间的衔接缝 , 来检测图像与图像之间是否可以进行拼接 , 并映射到雷达图像数据中 , 从而完成360度全景环视的拼接 。
【拘役|为实现360度全景环视 黑芝麻智能发明智能图像拼接方案】(校对/holly)
推荐阅读





- 6人入刑!北京通报7起党员干部和公职人员酒驾醉驾问题
- 在微信群说了这句话,他被判刑9个月!
- 不讲武德?老人要与公交司机决斗,不料司机激他下车后直接开走了
- 七旬老人尸体下葬入土,竟知晓两世轮回,转世投胎之恩怨
- 卑微丈夫进妻子卧室也要扫码付钱,200元1次,连女儿也不是亲生的
- 辽宁男子撞见女邻居出轨后也想揩油,入室抢劫又猥亵,终落入法网
- “殴打,活埋,剁手”24岁男幸存者自述:缅北不是天堂,而是噩梦的开始
- 你摊上大事了!重庆男子毒鱼被抓,网友为啥都支持重判呢
- 因不懂敬酒礼仪安徽一男子被酒友拘禁,事后获赔18万谅解对方,2021年8月该案审判,结果如何?
- 女子吃太饱在楼梯间休息,发现服务员楼底偷吃,“她可能太饿了”